
Importance of Proper Connecting ESC to Flight Controller
The connection between the 4 in 1 ESC and flight controller is the nervous system of your FPV drone. It dictates every twitch, tilt, and loop, translating your pilot commands into precise electrical signals that power the motors. Neglecting this connection is like flying blindfolded; you might take off, but a smooth, controlled flight? Not so much.
Here’s why a proper connecting esc to flight controller connection is crucial:
- Safety First: A wobbly, unreliable connection can lead to erratic motor behavior, potentially causing crashes and damaging your drone or worse. Imagine a rogue motor sending your drone spiraling towards the ground!
- Performance Precision: A seamless connection ensures smooth, responsive flight. Every nuance of your control stick will be translated into precise motor adjustments.
- Beyond Wires: It’s not just about physical connections. The 4 in 1 ESC and flight controllercommunicate through complex software protocols. Improper settings or firmware mismatch can wreak havoc.
- Feature Access: Many 4 in 1 ESCs and flight controllersboast advanced features like telemetry and motor diagnostics. However, these are locked away without a secure connection between the two.
If wiring esc to flight controller is not properly made, it can lead to a variety of problems, including:
- Motors not spinning
- Motors spinning at incorrect speeds
- Motors spinning in the wrong direction
- Flight controller crashing
Understanding the 4-in-1 ESC
In an FPV drone, the motor speed is managed by an ESC, or electronic speed controller. The flight controller sends throttle signals to the ESC, which uses these to drive the brushless motor at the appropriate speed. A 4-in-1 ESC combines the control of four distinct motors from four separate ESCs onto a single circuit board.
4in1 ESCs may be installed quickly and easily because they are often the same size as the flight controller. They require less wiring and soldering since they have fewer solder joints. Usually mounted behind the flight controller, the 4in1 ESC is connected by a single wire harness. You will have to compromise between convenience and risk, though, as you will have to replace the entire board if one ESC is destroyed. But since 4in1 ESC are so dependable these days, there’s usually no need to worry. Furthermore, because of their centered bulk, 4-in-1 ESCs provide superior weight distribution, which can improve the drone’s response.
Based on mounting patterns for various drone sizes, three 4in1 ESC sizes are available: 30x30mm, 20x20mm, and 16x16mm. Larger ESCs usually have larger FETs, which translate into more power and durability. The most popular size for 5″ and larger FPV drones is 30x30mm.


Checking Compatibility between 4 in 1 ESC and Flight Controller
Voltage
The 4 in 1 esc and flight controller must be compatible in terms of voltage. The ESC must be rated for the same voltage as the flight controller. For example, if the flight controller is rated for 4S, the ESC must also be rated for 4S.
Size
The mounting pattern of a flight controller is the distance between adjacent mounting holes. Common patterns include 30.5×30.5mm, 25.5×25.5mm, 20×20mm and 16×16mm. The pattern is usually determined by the size of the board and the type of aircraft it is intended for. Make sure the ESC and flight control dimensions match before connecting.
Current
The ESC must be rated for at least the same current as the motors. The continuous current rating of the ESC should be higher than the continuous current draw of the motors. The burst current rating of the ESC should be higher than the burst current draw of the motors.
Firmware
The 4 in 1 esc and flight controller must be compatible in terms of firmware. The ESC must be able to communicate with the flight controller using the same firmware protocol.
Today’s 4in1 ESCs are designed to be plugged in and experimented with, and are often sold in stacks with flight controllers. The ports and connections between flight controllers and ESCs from different brands may not be compatible, so it’s important to check before you connect. You run the risk of burning your FC if this happens. It is recommended to utilize “AIO (all in one) FC” if you want to use single ESC, which is an individual ESC mounted on the arms. These FCs have an integrated power distribution board, or PDB. However, this is out of style; 4in1 ESC is the newest fashion. In actuality, it’s growing harder and harder to locate a single ESC these days.
How to Connect ESC to Flight Controller
Motor connections
Assembling your quadcopter requires you to connect your ESC and motors. Soldering the motors to your ESC is usually the first soldering chore to do on a new build after the frame is assembled. Soldering the ESC to your power distribution board (PDB) and then wiring esc to flight controller. The motor wires must be connected to the correct ports on the ESC.
Connecting 4 in 1 ESC to Flight Controller
How to Connect 4 in 1 ESC to Flight Controller? Firstly wiring esc to flight controller is important in order to accept inputs. There are several motor output connections on each flight controller; these are often identified by the labels motor1, motor2, and occasionally by S1, S2, or M1, M2, etc. You can locate these by consulting the flight controller manual or by looking for labels on your flight controller.
Each ESC requires two wires in order to be connected to your flight controller. A ground and a signal. While it’s not strictly required, using a ground wire is advised as best practice to guarantee that all electronic equipment have a common ground, so please connect it. It matters which ESC you link in what order. Your drone’s motor 1 and motor 2 must be connected to connections 1 and 2, respectively. The order you must utilize will be specified in the handbook that comes with your flight controller software.
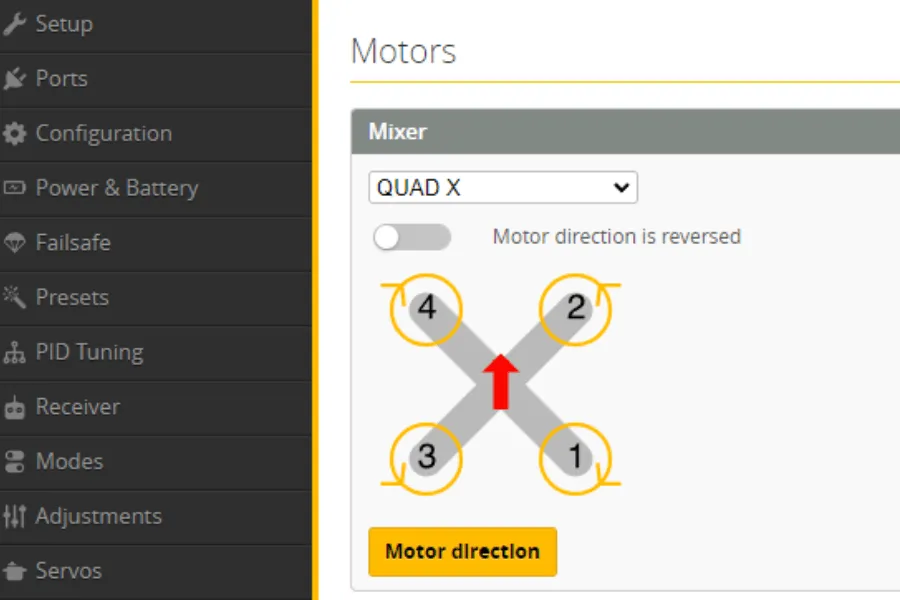
For instance, you would connect this motor/ESC to the motor connection 1 on your flight controller since Betaflight requires the back right motor to be motor 1. Likewise, motor 4 (the front left motor) must be connected to your flight controller’s motor connector 4.
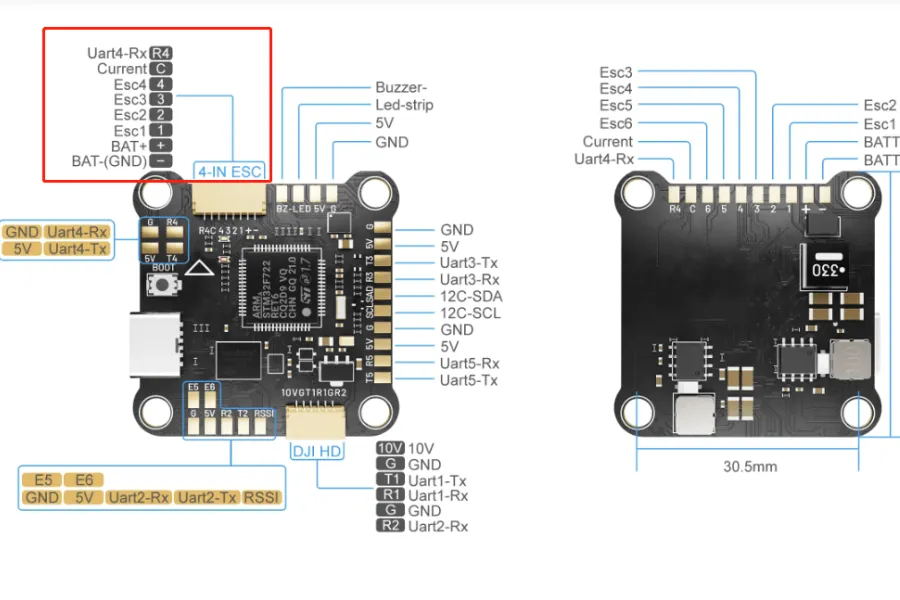
Let’s begin by examining the flight controller down below. It has ties with great labels. On the borders of the board, designated S1, S2, S3, and S4, are the four ESC connectors. Solder the signal wire from each of your ESCs to the appropriate pad. There is a ground pad next to each one, and you should solder the ESC signal ground wire to it.
Power connections
The power connections are used to connect the ESC to the battery. The power wires are typically red for positive and black for negative.
Signal connections
The signal connections connect the ESC to the flight controller, and the signal wire is typically yellow.
Configuration in Betaflight
System Configuration
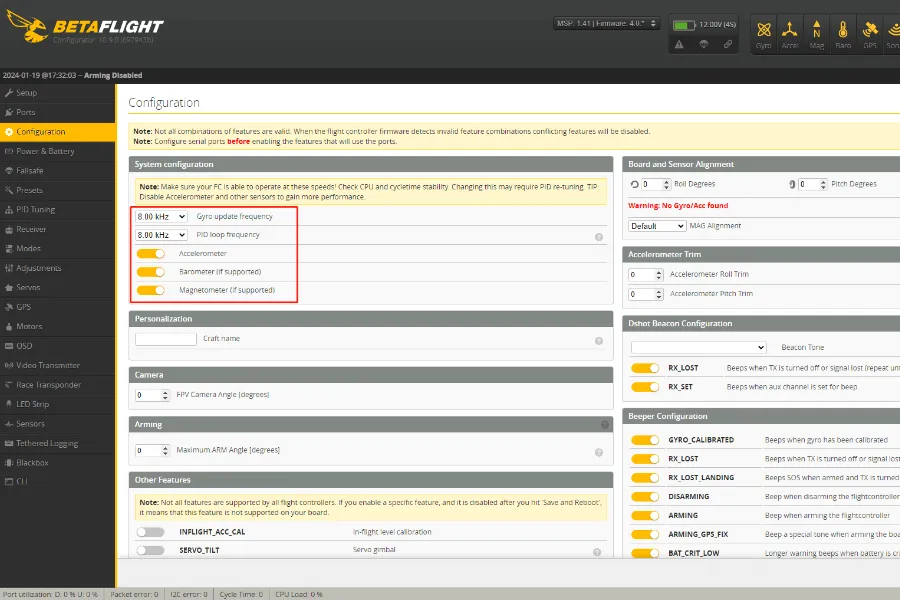
After configuring the receiver, we can now proceed to fine-tune a few Betaflight settings. We will first check the option for system configuration under the “Configuration Tab.”
You can choose your PID loop frequency and gyro update frequency here. For the majority of F7 flight controls, I advise configuring both to 8kHz. You will need to save and restart your flight controller after completing this. To apply the gyro update, though, you must also physically unplug your flight controller. Then double check your CPU load along the bottom bar after you’ve connected back up. At this stage, you don’t want it to be running much higher than 20–30%.
ESC and Motor Configuration
Checking the settings on your motors and ESC is the next step. We must first inform betaflight of the kind of ESC you are using by filling out the “ESC/Motors Feature” box on the “Configuration Tab.”
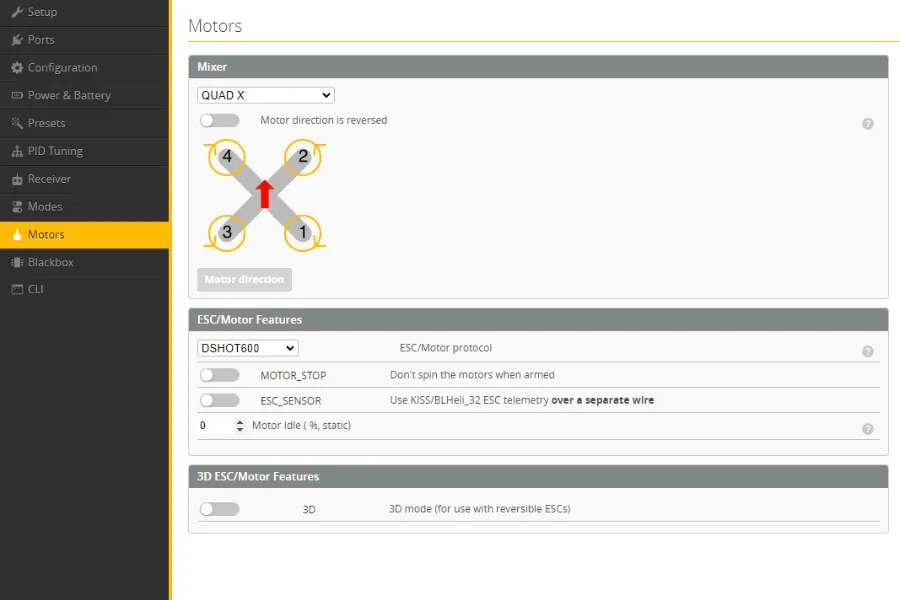
Here, you must indicate the protocol that your ESCs are operating on. Obviously, this may vary depending on the particular ESC you are using; for information on the protocol each ESC uses, see to its specifications. Oneshot, Multishot, Dshot, and Proshot are the options available to you. These days, almost all BLheli_S ESC operate on Dshot300. Thus if you’re unsure, I advise you to start with this setting. Choose Dshot600 if you are using a BLheli32 ESC.